
自動運転開発を体験するイベント「第1回AIラジコン大会」を開催しました ブックマークが追加されました
第1回AIラジコン大会の開催
2024年11月5日、シティサーキット東京ベイ*において、「第1回AIラジコン大会」を開催しました。本イベントは、当研究所が開発するAIラジコン(自動運転AIモデルを搭載したラジコン)を活用した自動運転開発の体験型イベントとして、多くの学生に参加いただきました。
背景
デロイト トーマツ サイバーセキュリティ先端研究所では、サイバーセキュリティに関する研究開発に加えて、新興技術に関する技術開発、ソリューション開発および技術支援に携わり、潜在的な価値の発掘や提起を行います。本取り組みでは、デジタルツインとAIの活用により、自動運転AIモデルを開発する体験型イベントを開催しました。
イベント概要
本イベントでは、参加者が自動運転開発のプロセスを体験することで、自動運転技術や次世代技術に対する興味・関心を深めます。参加者は、自身で作成したAIモデルをラジコンに搭載し、コースを自動走行させることでEnd-to-End方式の自動運転開発を体験します。
 参加者が自動運転開発の作業を行う様子
参加者が自動運転開発の作業を行う様子
自動運転開発システム
本イベントでは、当研究所の自動運転開発システムを使用しました。本システムでは、シティサーキット東京ベイのデジタルツインを活用し、サイバー空間上で学習データを収集することで、End-to-End方式の自動運転を実現します。本イベントでは、以下の3つのステップで自動運転を実装しました。
- Step1. デジタルツインの構築
- Step2. 自動運転AIモデルの作成
- Step3. AIモデルによる推論
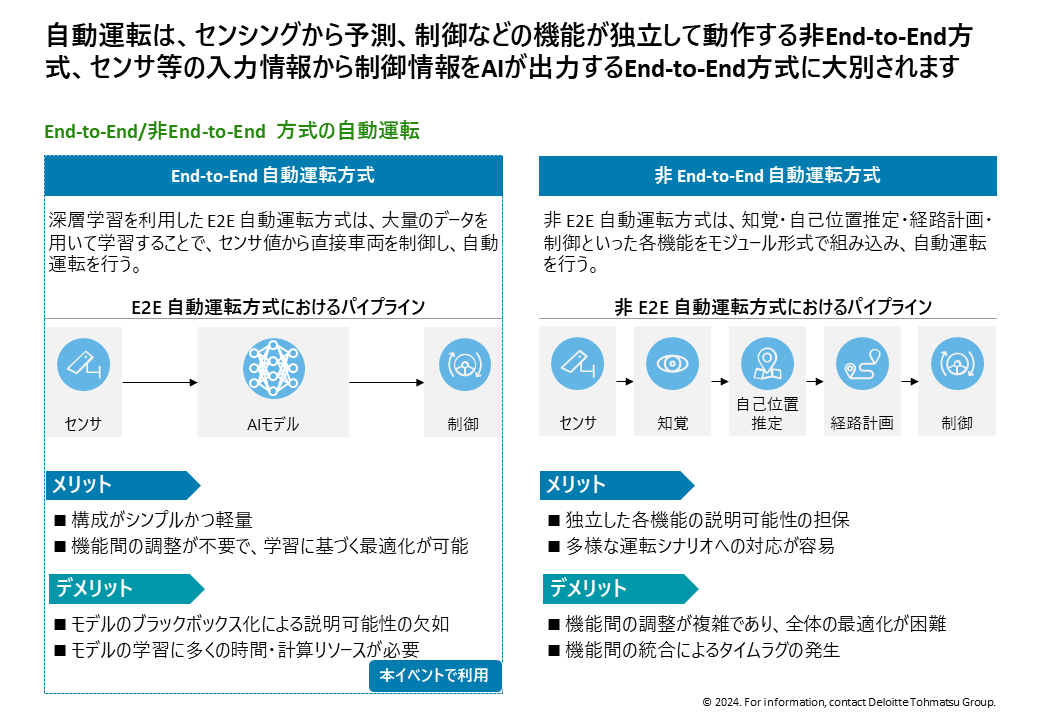 End-to-End方式/非End-toEnd方式の自動運転
End-to-End方式/非End-toEnd方式の自動運転
Step1では、シティサーキット東京ベイの屋内コースをサイバー空間上に再現し、学習データを収集するための環境を構築します。本イベントでは、Neural Radiance Fields (NeRF) 技術を用いて走行環境の3Dモデルを作成し、Unity上でラジコンの動作やLiDARセンサの動作を再現しました。
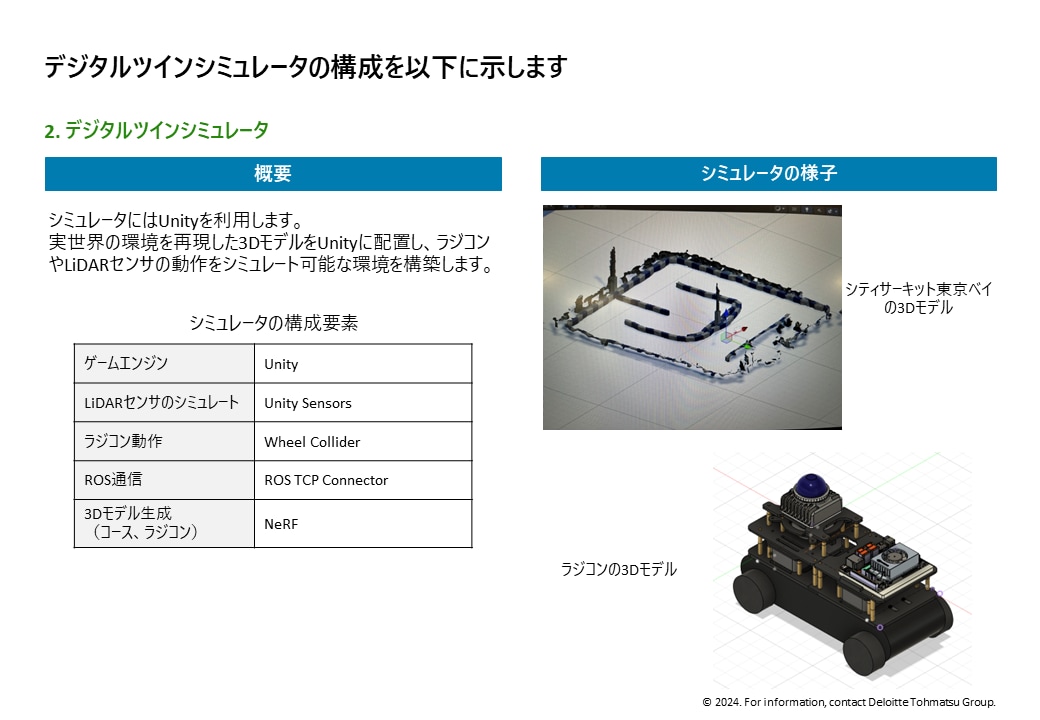 デジタルツインシミュレータの構成
デジタルツインシミュレータの構成
Step2では、LiDARセンサで取得した点群データをもとに、ラジコンのステアリングの値を出力するAIモデルを作成します。参加者は、デジタルツイン上のラジコンを操作し、AIモデルの作成に必要となる学習データ(点群データとステアリングの値)を収集しました。多様な走行パターンの学習データを収集後、PointNetベースのアーキテクチャをもとに、収集データを用いてAIモデルを学習しました。
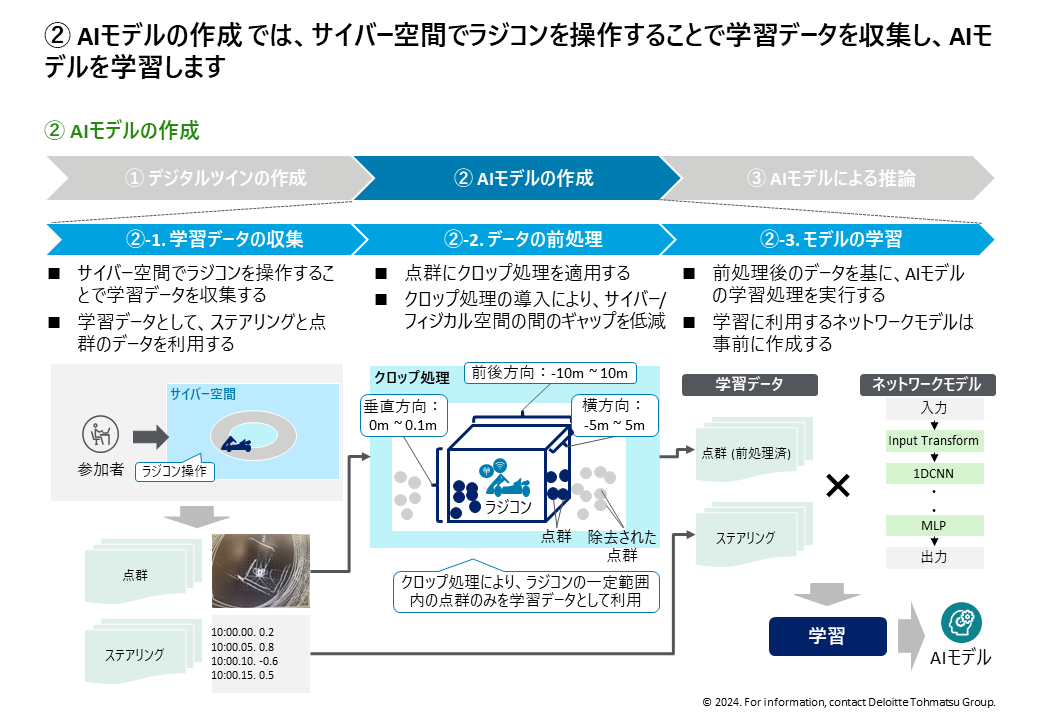 AIモデルの作成手法
AIモデルの作成手法
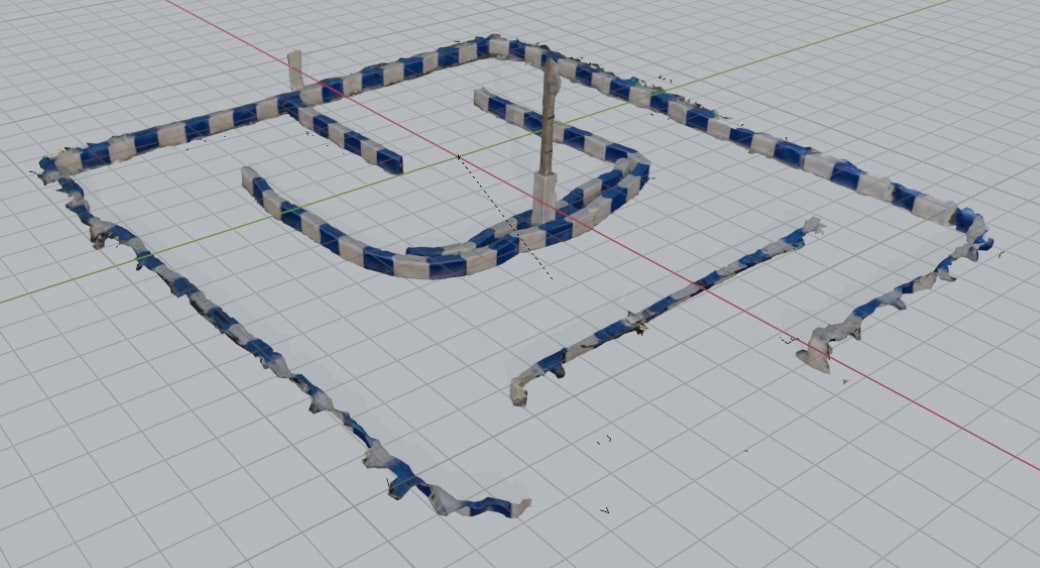 デジタルツイン環境の様子
デジタルツイン環境の様子
サイバー空間におけるデータ収集の様子
Step3. AIモデルによる推論
Step3では、学習したAIモデルをラジコンに搭載し、シティサーキット東京ベイの屋内コースを自動走行します。ラジコンに搭載したLiDARセンサの点群データがAIモデルに入力され、AIの出力をもとにラジコンがコースを自動で周回走行しました。
 AIラジコンによる自動走行の様子
AIラジコンによる自動走行の様子
今後の展望
参加者は、本イベントを通じて自動運転の開発プロセスを体験し、理論と実践の両面から自動運転技術への理解を深めました。
今後も当研究所では同様のイベントを継続的に実施すると同時に、本技術の活用による自動運転開発システムの高度化、デジタルツインならではの新たなレース体験の提供、EVカートを利用した自動運転の実現に取り組みます。
参考
- CITY CIRCUIT TOKYO BAY, https://city-circuit.com/(外部サイト)
プロフェッショナル

神薗 雅紀/Masaki Kamizono
デロイト トーマツ グループ イノベーション担当執行管理者
デロイト トーマツ サイバー合同会社所属。大学時代に国立研究開発法人情報通信研究機構(NICT)と共同研究に従事。2005年より大手ITメーカーにてインフラ専門SEとして、大規模システムの提案から設計・構築・運用に至るまで経験。 2009年よりセキュリティ専門会社に入社し、サイバーセキュリティに関する製品開発や多数の大規模国家プロジェクトの研究員およびプロジェクトマネージャーを担当。同時に、緊急時のインシデントレスポンス対応も行う。また、国内外のセキュリティカンファレンスにて広く研究発表も行う。 2…
Recommended for you
Opens_in_a_new_window